Transitive Closure of Graph
The adjacency matrix A = {aij } of a directed graph is the boolean matrix that has 1 in its ith row and jth column if and only if there is a directed edge from the ith vertex to the jth vertex. We may also be interested in a matrix containing the information about the existence of directed paths of arbitrary lengths between vertices of a given graph. Such a matrix, called the transitive closure of the digraph, would allow us to determine in constant time whether the j th vertex is reachable from the ith vertex.
Here are a few application examples. When a value in a spreadsheet cell is changed, the spreadsheet software must know all the other cells affected by the change. If the spreadsheet is modeled by a digraph whose vertices represent the spreadsheet cells and edges indicate cell dependencies, the transitive closure will provide such information. In software engineering, transitive closure can be used for investigating data flow and control flow dependencies as well as for inheritance testing of object-oriented software. In electronic engineering, it is used for redundancy identification and test generation for digital circuits.
DEFINITION The transitive closure of a directed graph with n vertices can be defined as the n × n boolean matrix T = {tij }, in which the element in the i th row and the jth column is 1 if there exists a nontrivial path (i.e., directed path of a positive length) from the ith vertex to the jth vertex; otherwise, tij is 0.
An example of a digraph, its adjacency matrix, and its transitive closure is given in Figure below:
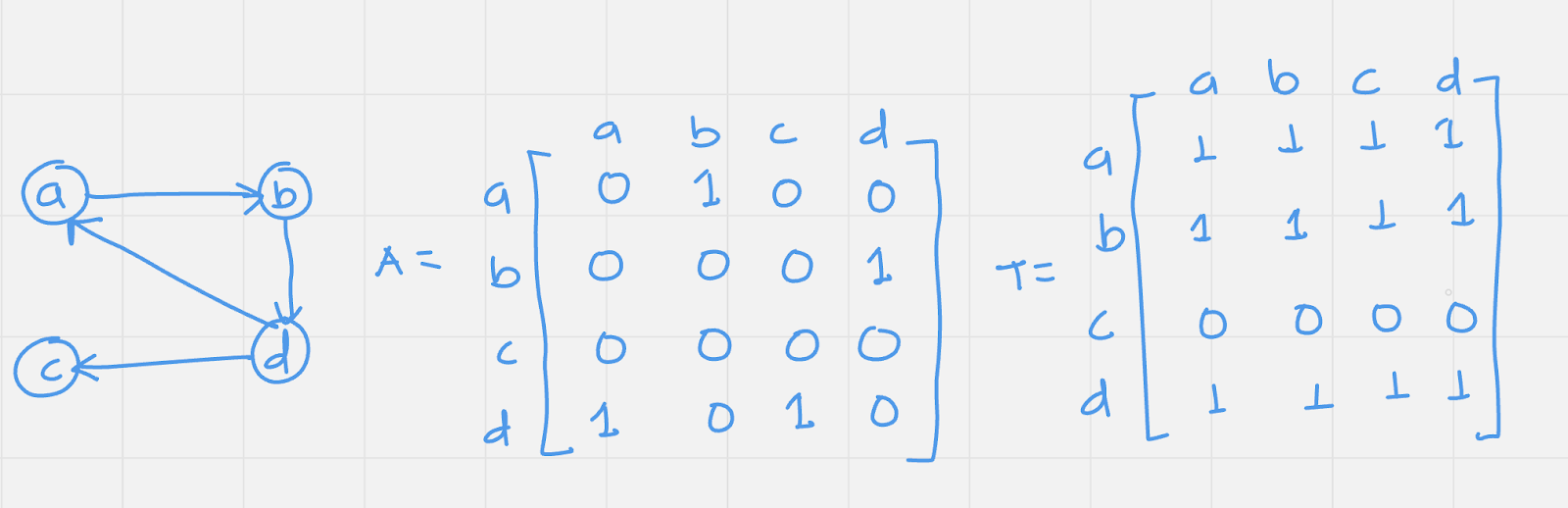
We can generate the transitive closure of a digraph with the help of depth- first search or breadth-first search. Performing either traversal starting at the ith vertex gives the information about the vertices reachable from it and hence the columns that contain 1’s in the ith row of the transitive closure. Thus, doing such a traversal for every vertex as a starting point yields the transitive closure in its entirety.